निर्देशिका
१. मुख्य अवधारणा र मेट्रिक्स
२. मापन प्रविधिहरू
३. डाटा प्रशोधन र त्रुटिहरू
४. प्रक्रियाको प्रभाव
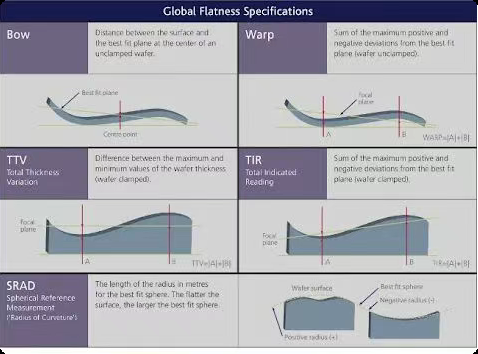
अर्धचालक निर्माणमा, वेफरहरूको मोटाई एकरूपता र सतह समतलता प्रक्रिया उपजलाई असर गर्ने महत्वपूर्ण कारकहरू हुन्। कुल मोटाई भिन्नता (TTV), धनुष (आर्क्युएट वारपेज), वारप (ग्लोबल वारपेज), र माइक्रोवार्प (न्यानो-टोपोग्राफी) जस्ता प्रमुख प्यारामिटरहरूले फोटोलिथोग्राफी फोकस, रासायनिक मेकानिकल पालिसिङ (CMP), र पातलो-फिल्म निक्षेपण जस्ता कोर प्रक्रियाहरूको परिशुद्धता र स्थिरतालाई प्रत्यक्ष रूपमा असर गर्छ।
मूल अवधारणा र मेट्रिक्स
TTV (कुल मोटाई भिन्नता)
ताना
वार्पले सन्दर्भ समतलको सापेक्षमा सबै सतह बिन्दुहरूमा अधिकतम शिखर-देखि-उपत्यका भिन्नताको परिमाण निर्धारण गर्दछ, मुक्त अवस्थामा वेफरको समग्र समतलताको मूल्याङ्कन गर्दछ।
मापन प्रविधिहरू
१. TTV मापन विधिहरू
- दोहोरो-सतह प्रोफाइलमेट्री
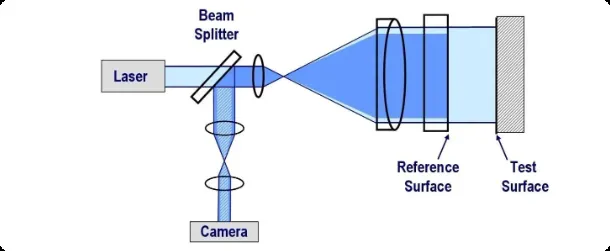
- फिजाउ इन्टरफेरोमेट्री:सन्दर्भ समतल र वेफर सतह बीचको हस्तक्षेप किनारहरू प्रयोग गर्दछ। चिल्लो सतहहरूको लागि उपयुक्त तर ठूला-वक्र वेफरहरू द्वारा सीमित।
- सेतो प्रकाश स्क्यानिङ इन्टरफेरोमेट्री (SWLI):कम-सहसंगत प्रकाश खामहरू मार्फत निरपेक्ष उचाइहरू मापन गर्दछ। चरण-जस्तो सतहहरूको लागि प्रभावकारी तर मेकानिकल स्क्यानिङ गति द्वारा सीमित।
- कन्फोकल विधिहरू:पिनहोल वा फैलावट सिद्धान्तहरू मार्फत सब-माइक्रोन रिजोल्युसन प्राप्त गर्नुहोस्। खस्रो वा पारदर्शी सतहहरूको लागि आदर्श तर पोइन्ट-बाइ-पोइन्ट स्क्यानिङको कारणले ढिलो।
- लेजर त्रिकोणीकरण:द्रुत प्रतिक्रिया तर सतह परावर्तन भिन्नताबाट शुद्धता गुमाउने सम्भावना हुन्छ।
- प्रसारण/परावर्तन युग्मन
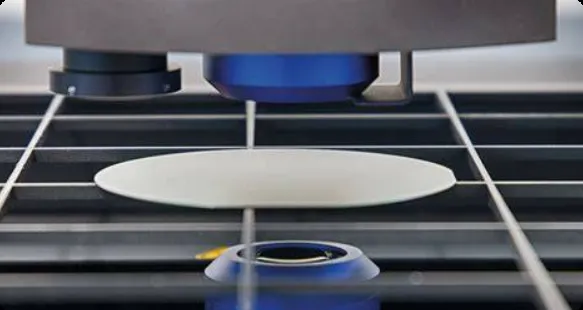
- डुअल-हेड क्यापेसिटन्स सेन्सरहरू: दुबै छेउमा सेन्सरहरूको सममित प्लेसमेन्टले T = L – d₁ – d₂ (L = आधारभूत दूरी) को रूपमा मोटाई मापन गर्दछ। छिटो तर भौतिक गुणहरू प्रति संवेदनशील।
- एलिप्सोमेट्री/स्पेक्ट्रोस्कोपिक रिफ्लेक्टोमेट्री: पातलो-फिल्म मोटाईको लागि प्रकाश-पदार्थ अन्तरक्रियाको विश्लेषण गर्दछ तर बल्क TTV को लागि अनुपयुक्त छ।
२. धनु र तानाको मापन
- बहु-प्रोब क्यापेसिटन्स एरेहरू: द्रुत 3D पुनर्निर्माणको लागि एयर-बेयरिङ स्टेजमा पूर्ण-क्षेत्र उचाइ डेटा क्याप्चर गर्नुहोस्।
- संरचित प्रकाश प्रक्षेपण: अप्टिकल आकार प्रयोग गरेर उच्च-गतिको 3D प्रोफाइलिङ।
- कम-एनए इन्टरफेरोमेट्री: उच्च-रिजोल्युसन सतह म्यापिङ तर कम्पन-संवेदनशील।
३. माइक्रोवार्प मापन
- स्थानिय आवृत्ति विश्लेषण:
- उच्च-रिजोल्युसन सतह स्थलाकृति प्राप्त गर्नुहोस्।
- २D FFT मार्फत पावर स्पेक्ट्रल घनत्व (PSD) गणना गर्नुहोस्।
- महत्वपूर्ण तरंगदैर्ध्यहरू अलग गर्न ब्यान्डपास फिल्टरहरू (जस्तै, ०.५-२० मिमी) लागू गर्नुहोस्।
- फिल्टर गरिएको डेटाबाट RMS वा PV मानहरू गणना गर्नुहोस्।
- भ्याकुम चक सिमुलेशन:लिथोग्राफीको समयमा वास्तविक-विश्व क्ल्याम्पिङ प्रभावहरूको नक्कल गर्नुहोस्।
डेटा प्रशोधन र त्रुटि स्रोतहरू
कार्यप्रवाह प्रशोधन गर्दै
- टिभी:अगाडि/पछाडिको सतह निर्देशांकहरू पङ्क्तिबद्ध गर्नुहोस्, मोटाई भिन्नता गणना गर्नुहोस्, र व्यवस्थित त्रुटिहरू घटाउनुहोस् (जस्तै, थर्मल ड्रिफ्ट)।
- धनुष/ताना:LSQ प्लेनलाई उचाइ डेटामा फिट गर्नुहोस्; धनुष = केन्द्र बिन्दु अवशिष्ट, वार्प = शिखर-देखि-उपत्यका अवशिष्ट।
- माइक्रोवार्प:स्थानिय फ्रिक्वेन्सीहरू फिल्टर गर्नुहोस्, तथ्याङ्क गणना गर्नुहोस् (RMS/PV)।
प्रमुख त्रुटि स्रोतहरू
- वातावरणीय कारकहरू:कम्पन (इन्टरफेरोमेट्रीको लागि महत्वपूर्ण), वायु अशान्ति, थर्मल ड्रिफ्ट।
- सेन्सर सीमाहरू:चरण आवाज (इन्टरफेरोमेट्री), तरंगदैर्ध्य क्यालिब्रेसन त्रुटिहरू (कन्फोकल), सामग्री-निर्भर प्रतिक्रियाहरू (क्यापेसिटन्स)।
- वेफर ह्यान्डलिङ:किनारा बहिष्करण गलत अलाइनमेन्ट, सिलाईमा गति चरण अशुद्धता।

प्रक्रिया आलोचनामा प्रभाव
- लिथोग्राफी:स्थानीय माइक्रोवार्पले DOF घटाउँछ, जसले गर्दा CD भिन्नता र ओभरले त्रुटिहरू हुन्छन्।
- सीएमपी:प्रारम्भिक TTV असन्तुलनले गैर-एकरूप पालिसिङ दबाब निम्त्याउँछ।
- तनाव विश्लेषण:धनुष/तार्प विकासले थर्मल/यान्त्रिक तनाव व्यवहार प्रकट गर्दछ।
- प्याकेजिङ:अत्यधिक TTV ले बन्डिङ इन्टरफेसमा खाली ठाउँहरू सिर्जना गर्छ।
XKH को नीलमणि वेफर
पोस्ट समय: सेप्टेम्बर-२८-२०२५